Ixiv专栏是机器之心发布学术、技术内容的栏目。过去数年,机器之心AIxiv专栏接收报道了2000多篇内容,覆盖全球各大高校与企业的顶级实验室,有效促进了学术交流与传播。如果您有优秀的工作想要分享,欢迎投稿或者联系报道。投稿邮箱:liyazhou@jiqizhixin.com;zhaoyunfeng@jiqizhixin.com
想象这样一个场景:你正在火锅店和朋友畅聊,一个机器人熟练地为你倒饮料、端菜,完全不需要你分心招呼服务员。这个听起来像科幻的场景,已经被清华大学交叉信息院的研究者们变成了现实!他们发现了具身智能领域的 “圣杯”——data scaling laws,让机器人实现了真正的零样本泛化,可以无需任何微调就能泛化到全新的场景和物体。这一突破性发现,很可能成为机器人领域的 “ChatGPT 时刻”,彻底改变我们开发通用机器人的方式!
从火锅店到电梯,机器人展现惊人泛化力
研究团队可不是只在实验室里玩玩具。他们把机器人带到了各种真实场景:火锅店、咖啡厅、公园、喷泉旁,甚至是电梯里。更令人震惊的是,机器人在这些前所未见的环境中都展现出了超强的适应能力!
为了确保研究的可复现性,团队慷慨地开源了所有资源,包括耗时半年收集的海量人类演示数据:

Scaling Laws:从 ChatGPT 到机器人的制胜法则
还记得 ChatGPT 为什么能横空出世吗?答案就是 scaling laws!现在,清华团队首次证明:这个法则在机器人领域同样适用。事实上,真正的 scaling laws 包含数据、模型和算力三个维度,而本研究重点突破了最基础也最关键的数据维度。
研究团队使用便携式手持夹爪 UMI,在真实环境中收集了超过 4 万条人类演示数据。他们采用最新的 Diffusion Policy 方法从这些数据中学习机器人控制模型,并通过惊人的 15000 次实机测试进行严谨评估,最终发现了三个革命性的幂律关系:
模型对新物体的泛化能力与训练「物体」数量呈幂律关系。模型对新环境的泛化能力与训练「环境」数量呈幂律关系。模型对环境 - 物体组合的泛化能力与训练「环境 - 物体对」的数量呈幂律关系。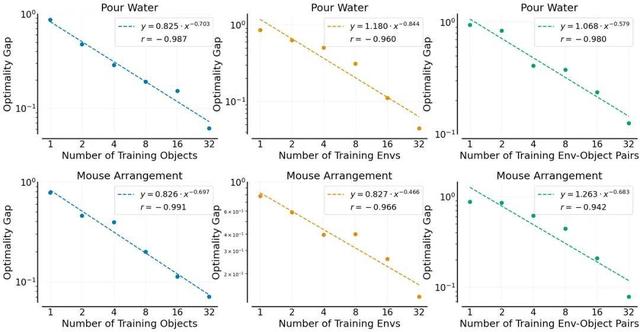
相关文章






关于作者

猜你喜欢
成员 网址收录40394 企业收录2981 印章生成234230 电子证书1033 电子名片60 自媒体46877































