
大数据文摘转载自机器人大讲堂
近日,微软在其官网发表了一篇名为《机器人 ChatGPT:设计原则和模型能力(ChatGPT for Robotics: Design Principles and Model Abilities)》论文,公布了他们正在把ChatGPT应用于机器人上的研究成果,展现出了新人工智能语言模型ChatGPT实现自然的人机交互的可能性,为如何将ChatGPT 融入机器人领域提供了一种全新的视角。
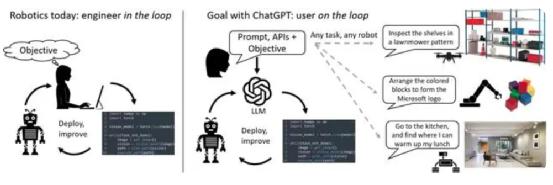
与纯文本的应用不同,研究人员希望ChatGPT能够帮助人们更轻松地与机器人互动,而无需学习复杂的编程语言或有关机器人系统的详细信息。但其中的关键难题就是如何教ChatGPT学习和确定物理定律、操作环境的背景以及了解机器人的物理行为如何改变世界状态,而且所生成机器人模型需要具备相当的常识性知识和符合实际的物理模型,以及与用户交互以解释和执行实际现实中可行的命令,并以此来解决指定的任务。
如何加快ChatGPT在机器人应用领域的开发,推动机器人向可执行任务的“人类助手”进化,研究者们正为此绞尽脑汁。以下介绍了几个全球范围内较为新颖的机器人 ChatGPT研究方向。
机器人复杂动作实时修正
ChatGPT拥有出色的语言理解和对话能力,但缺乏对于物理现实世界的直观感知。
我们从微软的方式中可以发现,其主要将视觉数据和大型语言模型结合起来进行机器人控制,其核心逻辑就是先用ChatGPT生成计算机代码,然后这些代码可以控制机器人。
已经有研究者发现,这种方式的局限性在于ChatGPT的训练学习样本具有固定性,代码表现就非常呆板,这直接导致一旦更换最新的硬件,机器人本身容易出现不兼容问题,缺乏作为开发人员的基本应变能力。
然而机器人控制工作如今的大方向就是柔性化,这意味着机器人控制的问题在于,计算机代码很难通过一两个固定程序实现,而是大多时候需要工程师在现场根据工况和特定的硬件量身定制。
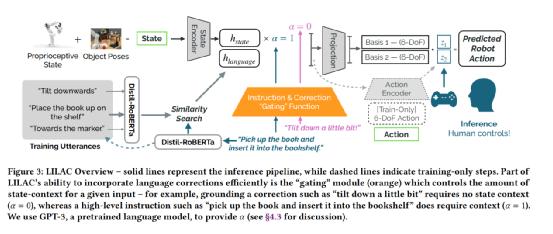
斯坦福大学的一篇名为《“No, to the Right”-Online Language Corrections for Robotic Manipulation via Shared Autonomy》的文献中就指出了这种问题。文中提到,以语言为导向的人机交互系统必须满足适应性和学习效率两个关键需求才有望被广泛采用,但不幸的是,现有的语言转换指令集难以做到适应,尤其缺乏融入实时自然语言的能力,即便可以,也需要通过数百次的示教或者要让机器人去重新学习简单的策略。
为此,在他们的研究工作中,尝试通过一种人机协作环境下的自然语言界面学习框架(LILAC),采取人机融合的方式完成对自然语言的动作修正,去探索人类丰富操作中的变量。其研究表明,与现有的闭环编程控制方式相比,这种更开放的指令跟随和共同纠错协同方法获得了更高任务完成率,并且由于其可靠性、准确性和易用性更容易受到用户喜爱。
关于 Franka Emika
Franka Emika 是一家总部位于慕尼黑的机器人公司,由 Sami Haddadin和他的兄弟 Simon,以及一支经验丰富的机器人专家团队于 2016 年创立。公司自成立以来不断发展壮大,现有员工超200人。Franka Emika 是开发具有人类触觉的机器人技术的先驱,被认为是过去 140 年来德国最重要的发明之一。它具有类似于人类手臂的独特灵巧性,敏捷且安全。在中国区,Franka Emika全权委托TQ集团提供全流程的机器人服务。

相关文章








关于作者

猜你喜欢































